September 29, 2023, by Communications
Scenario-Based Safety Testing of Autonomous Vehicle for Malaysian Environment
National Automotive Policy 2020 (NAP 2020) for Malaysian Automotive Industries
Next-generation vehicle technology has become the key direction for the Malaysian Transportation System in recent years. One of the important aspects that emphasize the requirement for next-generation vehicles is stated in the National Automotive Policy 2020 (NAP 2020). The policy was developed with support from various ministries, agencies, academia, intellects, financial institutions, research and analysts’ entities, associations, and industry players. The policy mainly emphasizes the future development targets and specific strategic plans for Malaysia’s automotive industry. According to the 7th Prime Minister of Malaysia, The NAP 2020 will continue to promote the participation of local companies in the domestic and global supply chain, encourage R&D and engineering activities, build capabilities and capacity of the local workforce, support national car projects as well as enhancing exports, investments, and local production volume. This is mainly emphasized by the “smart” element in the new technologies such as Smart City, Smart Delivery, Smart Manufacturing, Smart Grid, and Smart Mobility as shown in Figure 1.
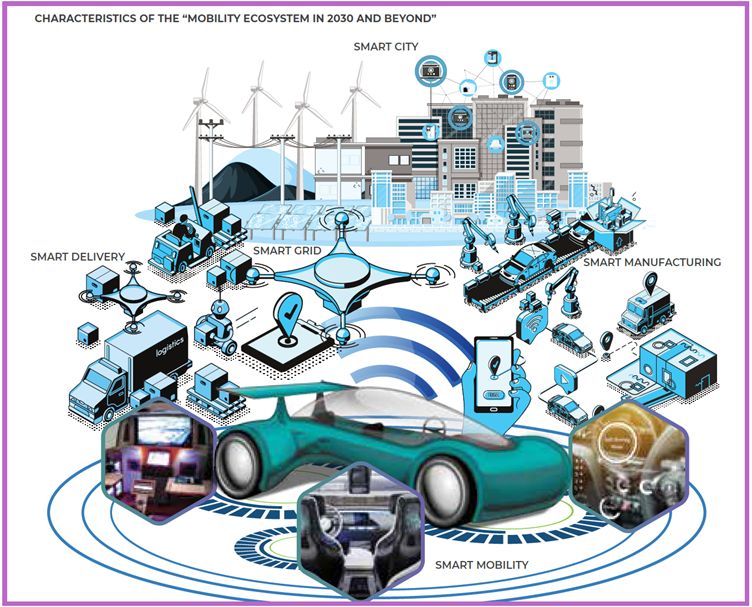
Fig. 1: National Automotive Policy 2020 focusing on “Smart” Element from NAP2020
The policy encourages new growth in vehicular technology in Smart Mobility such as the Next Generation Vehicle (NxGV) and Mobility as a Service (MaaS), which is the current focus in Malaysia’s automotive technology. It can be noted in the new NAP 2020 that NxGV, MaaS, and Industrial Revolution (IR4.0) have been added as new elements that are in line with the development of future automotive technologies. Next generation vehicle (NxGV) has been classified as a vehicle that meets the definition of EEV classifications and is enhanced with Intelligent Mobility applications with a minimum Level 3 Vehicle Automation such as Conditional Automation. Besides, the NxGV is also classified based on the Society of Automotive Engineers (SAE) standards based on the five levels of Autonomous Driving Level.
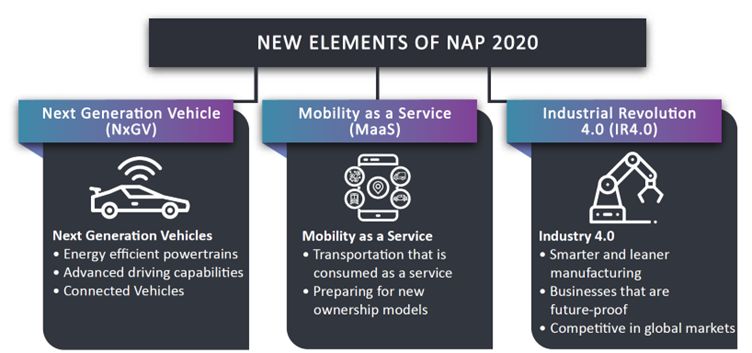
Fig. 2: Integration of Services and Electric & Electronic (E&E) Sector In The Automotive Sector from NAP2020
Current Approach for Autonomous Vehicle Testing in Malaysia
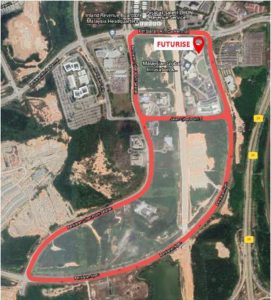
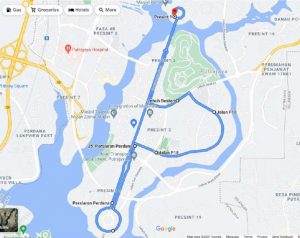
Recently, the Ministry of Transport with support from Futurise Sdn Bhd has published the updated version of “Guidelines for Public Road Trials of Autonomous Vehicles” for the development and testing the autonomous vehicles in Malaysia. This guideline is used as a guide government for the agencies to plan and conduct physical trials of autonomous vehicles on designated Malaysian public roads. The Guideline sets out relevant information on the AV Trial routes, application process, safety, and technical requirements, and rules governing the conduct of such AV trials. In the guideline, it can be noted that several locations have been selected as the designated roads for testing the autonomous vehicles. The designated routes for testing autonomous vehicles are located at Cyberjaya, Putrajaya, Selangor, and Johor called MaGIC Route A and B (Cyberjaya), Route A and B (Putrajaya), Route A (Sunway), and MRANTI Route A and B (Bukit Jalil). Figures 3-11 show the designated road for the public trials of autonomous vehicles in Malaysia. However, among all the routes, the MRANTI Route A and B is the private entity location, and this location has been used to design the test cases for the safety testing of autonomous vehicles based on “Scenario Identification and Classification Framework for ADAS Testing” proposed by a research group called Automated Vehicle Engineering System (AVES) from the University of Nottingham Malaysia.
Several government agencies have shown initiation towards vehicle safety and autonomous vehicle testing. Malaysian Automotive, Robotics, and IoT Institute (MARii) also actively plays an important role in establishing the autonomous vehicle testing protocol in Malaysia. Over the past two years, MARii has been very active in supporting government initiatives such as planning for an autonomous vehicle test bed and signing a Memorandum of Understanding (MoU) with Proton, CARARC, and DRB-HICOM for adoption of next-generation mobility technologies. On the other hand, MARii and Multi-Code Electronics Industries (MCE) have signed a MoU on the development of critical components to accelerate the implementation of autonomous driving and connected mobility, in line with the National Automotive Policy 2020. On the other hand, Futurise has also established MyAV to address several aspects such as regulatory sandbox, supporting infrastructure for the testbed, and approval of test routes for autonomous vehicle testing. Moreover, another government agency called MRANTI has established a living lab called MRANTI Autonomous Vehicle Living Lab to conduct scenario-based safety testing in virtual and physical by collaborating with the AVES research group from the University of Nottingham Malaysia.
-

- Fig. 3. Route A (Cyberjaya)
-
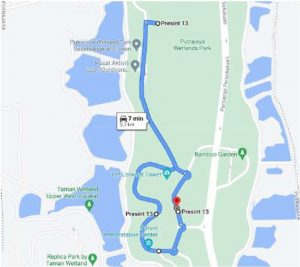
- Fig. 5. Route A (Putrajaya)
-
- Fig.6. Route B (Putrajaya)
-

- Fig.7: Route A – Designated route of the BRT Sunway line.
-
- Fig. 8: Route A in Iskandar Puteri
-

- Fig.9: Route B in Iskandar Puteri
-

- Fig. 10: Route A – Designated route of the rural campus area
-

- Fig.11: Route B – Designated route of the highway lane and urban area
Formation of Automated Vehicle Engineering System (AVES) Research Group
According to the My Autonomous Vehicle (MyAV) under Futurise, several challenges have been identified for testing and deployment of autonomous vehicles in Malaysia. Firstly, the sensor requirement for an autonomous vehicle in order to overcome the drawbacks due to bad weather, heavy traffic, and road signs with graffiti on them can negatively impact the accuracy of sensing capability. Second, machine learning is not widely accepted and agreed upon to ensure that the autonomous vehicle can be always safe. The next challenge mainly highlights the open road physical testing. The main issue is to ensure the Automated Driving System (ADS) continues to be safe even with future upgrades and store all the previous safe behaviors. Another challenge is focusing on the regulation focusing on testing autonomous vehicles in Malaysia. Currently, the Malaysian government has proposed new guidelines for physical trials as shown in Figures 3-10. There still of lack in terms of testing standards and procedures for any Autonomous Vehicle developers to deploy their vehicles on the road in Malaysia. It can be noted that the initiatives from the Malaysian government, companies, and universities show that Malaysia is already moving forward towards the deployment and testing of autonomous vehicles. However, a proper homologation process is required to address most of the challenges before moving towards physical testing as mentioned in guidelines to meet the requirement for developing countries such as Malaysia, which has high traffic flow and accident rates. Some of the complex scenarios could not be tested on a physical road since the testing location is more like a controlled environment. Besides, complex scenarios involving a large number of road users could not be tested on actual roads in order to avoid unwanted road casualties during testing. Taking into consideration, a research group called Automated Vehicle Engineering System (AVES) as shown in Figure 12, takes the initiative to conduct the research and development focusing on the safety testing of autonomous vehicles focusing on Malaysian roads and traffic environment. In order to initiate the research activities, two major fundings have been secured by the AVES research group called The Yayasan Tun Ismail Professorial Chair Programme (YTIPCP) and ASEAN NCAP Collaborative Holistic Research IV (ANCHOR IV).

Fig. 12: Automated Vehicle Engineering System (AVES) Research group Logo
Scenario-Based Virtual Safety Assessment Framework using Human-Machine-Interface
In order to overcome the challenges mentioned in the previous section, an adequate safety testing framework is required before deploying an autonomous vehicle in Malaysia as shown in Figure 13. The safety testing framework that is aimed to be developed can be used to supervise autonomous vehicles to adapt to Malaysian roads and traffic scenarios. Besides, the framework can be used to evaluate the capability of an autonomous vehicle to perform emergency braking and obstacle avoidance autonomously to minimize road accidents using ADAS/ADS technology. Therefore, a framework is developed as part of the AVES initiative by investigating the important elements that need to be focused on the development of safety assessment of autonomous vehicles for virtual and physical environments using Malaysian road and traffic environments.
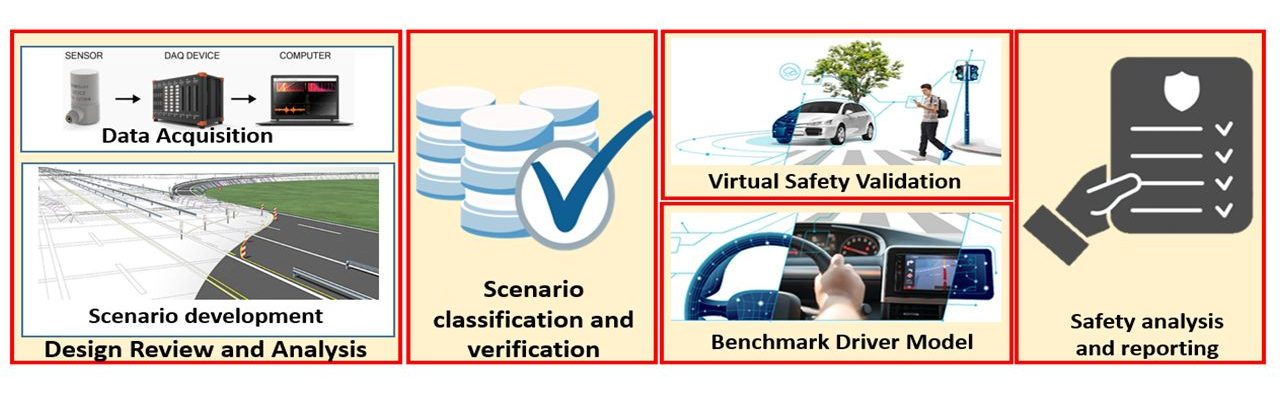
Fig.13. Virtual Validation of Scenario-Based Assessment Workflow
Based on the assessment workflow, the virtual safety testing framework is developed in this study to evaluate the performance of autonomous vehicles as shown in Figure 14. There are a few stages that need to be considered in the assessment methodology. Firstly, scenario identification and classification are required to investigate the required scenario to be developed and assessed in the virtual testing platform for autonomous vehicles. This required video recordings from actual scenarios in selected roads and traffic networks in Malaysia. Then, the second stage is focused on the environment modeling and scenario generation virtually known as a test case, based on the actual scenario that has been classified in the first stage. Then, the third stage focuses on the development of the vehicle model based on the actual vehicles in Malaysia and then the development of the driver prediction model. The vehicle model developed in this platform needs to be validated with an actual vehicle to assure the accuracy of the model before conducting virtual testing. Meanwhile, the driver model is validated using actual human driving responses collected from various drivers in Malaysia and also from the 6DOF vehicle driving simulator. The driving pattern of Malaysian drivers needs to be studied carefully and the optimum driving response in order to validate the driver prediction model. This model will be used as the benchmark driver model in the safety testing platform. The last stage is focusing on the safety assessment for urban driving whereby a collision avoidance system is mainly used for this assessment. A combination of ADAS technology such as adaptive cruise control, lane keeping assist system (LKAS), automated emergency steering (AES), and automated emergency braking (AEB) are used for the safety analysis. The overall simulation platform was established using the IPG Automotive simulation tool called IPG CarMaker. Figure 6 shows scenario-based simulation testing by integrating all the stages for the safety testing with human-machine interface.
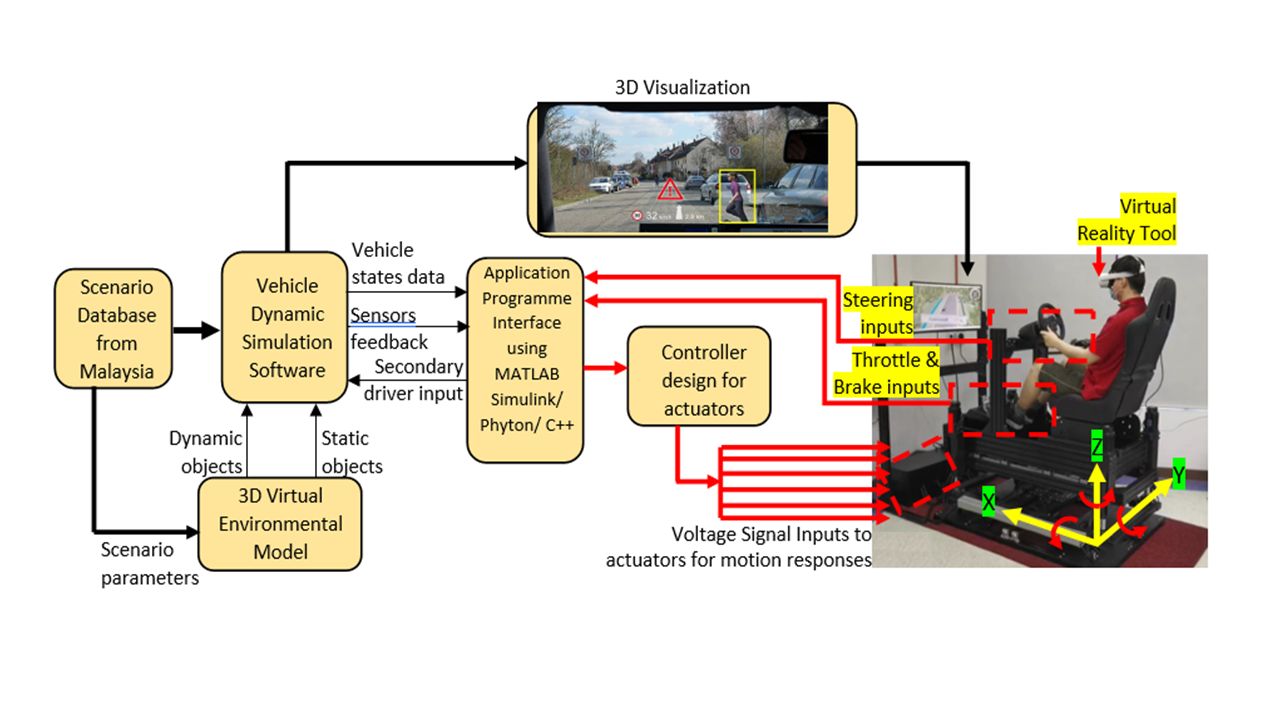
Fig. 14. Integrated 6DOF Platform for Virtual Simulation of Autonomous Vehicle

Fig. 15: Safety testing of Autonomous Vehicle for Level 3 Condition with Human-Machine-Interface
Establishment of MRANTI Autonomous Vehicle Living Lab (AVLL)
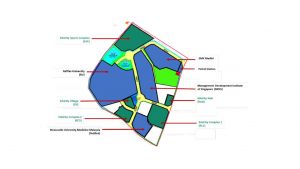
Early this year, MRANTI initiated to idea to establish the MRANTI AV Living Lab to support the autonomous vehicle developers to test and deploy their technology at MRANTI. This idea has a major impact on the local and international companies and startups to focus on the Malaysian Autonomous Vehicle ecosystem. In order to strengthen the idea, a research collaboration has been initiated with the Automated Vehicle Engineering System (AVES) research group where the team is already focusing on safety testing analysis in a virtual simulation platform. By collaborating with the AVES research group, the MRANTI AV Living Lab accelerates the idea of safety testing at MRANTI Park by developing the virtual environment model MRANTI Route A and B as well as designing the relevant test cases for the safety testing of autonomous vehicles. The test cases are designed based on EURO NCAP, ASEAN NCAP, and Malaysian traffic scenarios which gives a unique identity to traffic conditions in developing countries such as Malaysia. Moreover, after signing the collaboration with AVES, MRANTI has signed an agreement with the Center of Excellence for Testing and Research of Autonomous Vehicle@NTU (CETRAN), which is leading in the development and safety testing for autonomous vehicle targeting for Level 4 and Level 5 autonomy. This collaboration has had a positive impact on MRANTI AV Living Lab because the team can use CETRAN as a benchmark team to develop the test cases for the safety assessment of autonomous vehicles at MRANTI Park. Figure 16 shows the overall collaboration that has been established under the MRANTI AV Living Lab.
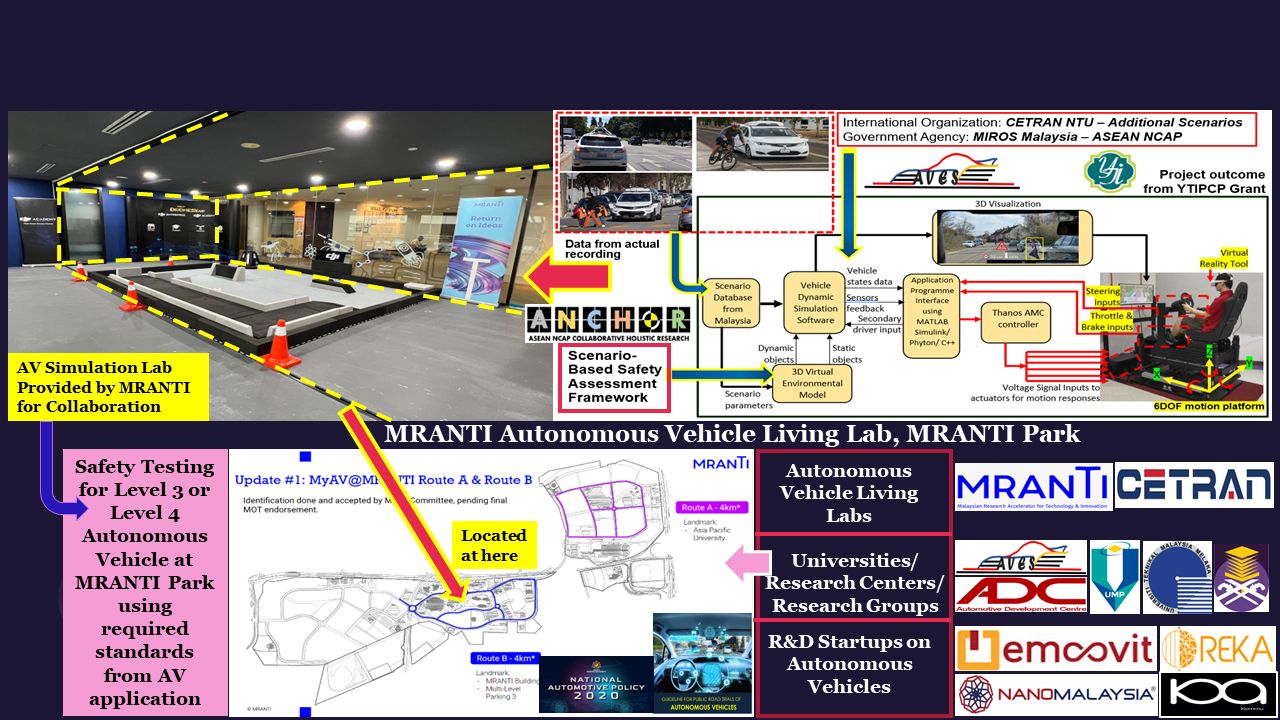
Fig. 16: Collaboration framework for MRANTI AV Living Lab
-
Post a comment




